
Ordinary Differential Equations (2): First-Order Methods
Master the four main techniques for first-order ODEs: separation of variables, integrating factors, exact equations, and Bernoulli substitution -- with applications to finance, pharmacology, ecology, and circuits.
A bank account, a drug clearing the bloodstream, a tank of brine, a charging capacitor — they all obey the same kind of equation: a first-order ODE. The trick is recognising which of four shapes you are looking at, because each shape has a closed-form move that solves it cleanly. By the end of this chapter you will pattern-match an unfamiliar first-order equation in seconds and know exactly which lever to pull.
What You Will Learn#
- How to spot a separable equation and integrate it directly.
- The integrating factor that turns a linear equation into a perfect derivative.
- The exactness test and what it means geometrically: solutions are level curves of a potential.
- The Bernoulli substitution $v = y^{1-n}$ that linearises a whole family of nonlinear equations.
- Five real applications: drug half-life, RC charging, salt mixing, logistic growth, exponential interest — each one a small case study you can reuse.
Prerequisites#
- Chapter 1 ideas: what an ODE is, what an initial value problem is, how a slope field looks.
- Standard integration: substitution, integration by parts, partial fractions.
Separable equations: the most natural form#
The shape#
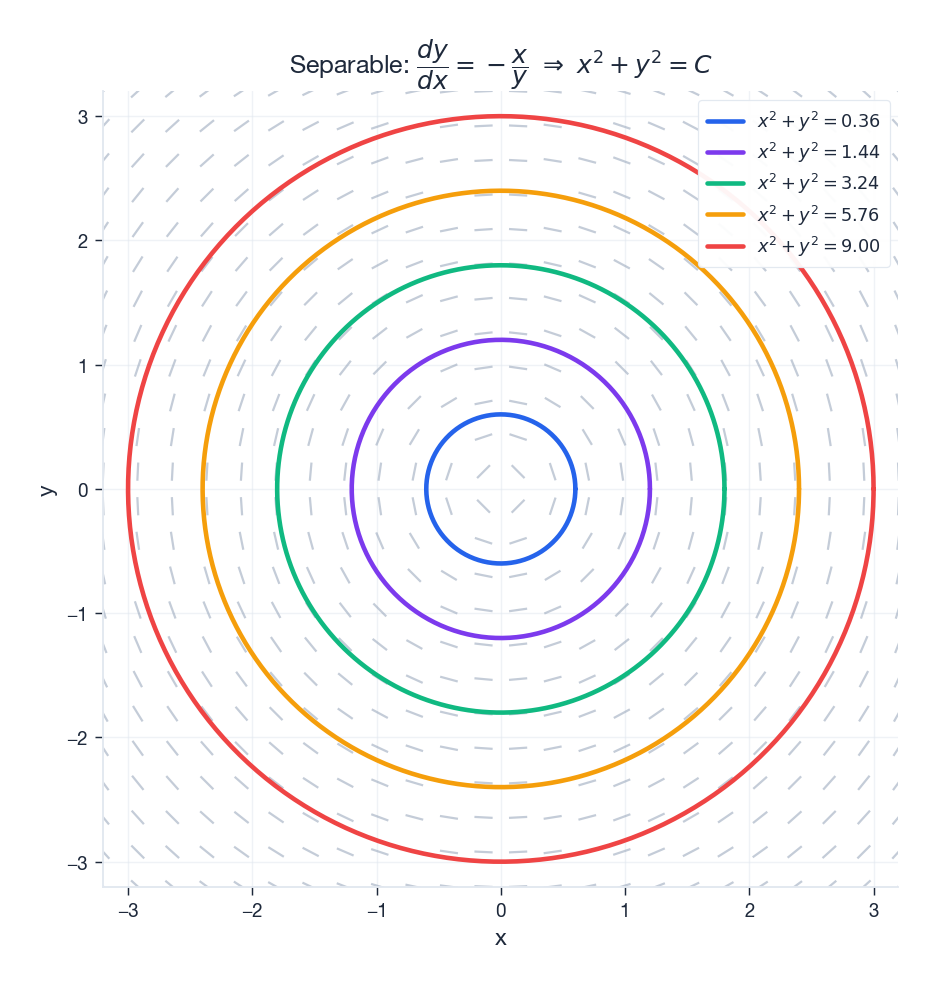
$$\frac{dy}{dx} \;=\; g(x)\,h(y).$$ $$ \frac{dy}{h(y)} \;=\; g(x)\,dx \qquad\Longrightarrow\qquad \int \frac{dy}{h(y)} \;=\; \int g(x)\,dx + C. $$The constant $C$ is the family parameter — every choice picks out one solution curve. In the figure below, separating $\frac{dy}{dx} = -x/y$ gives $y\,dy + x\,dx = 0$ , which integrates to $x^2 + y^2 = C$ : a one-parameter family of circles. The slope-field arrows are tangent to these circles everywhere — exactly what “solution” means.
Worked example: exponential growth and decay#
Solve $\dfrac{dy}{dx} = ky$ for constant $k$ .
- Separate. $\;\dfrac{dy}{y} = k\,dx$ .
- Integrate both sides. $\;\ln|y| = kx + C_1$ .
- Exponentiate. $\;y = A e^{kx}$ , where $A = \pm e^{C_1}$ absorbs the sign and the constant.
What just happened? The growth rate $k$ controls the time scale, not the shape. Two interpretations:
- $k > 0$ : doubling every $\ln 2 / k$ — populations with no resource limit, continuously compounded interest, runaway nuclear chain reaction.
- $k < 0$ : half-life of $\ln 2 / |k|$ — radioactive decay, a charged capacitor draining, a drug being cleared by the liver.
Application: drug metabolism and the half-life rule#
$$\frac{dC}{dt} = -kC, \qquad C(t) = C_0 e^{-kt}.$$ $$t_{1/2} = \frac{\ln 2}{k} \approx \frac{0.693}{k}.$$For ibuprofen $t_{1/2} \approx 2$ h. Starting from a 400 mg dose:
| Time | Remaining | What it means |
|---|---|---|
| 0 h | 400 mg | peak |
| 2 h | 200 mg | one half-life |
| 4 h | 100 mg | two half-lives |
| 6 h | 50 mg | sub-therapeutic |
That’s why ibuprofen is dosed every 4–6 h: any longer and the level falls below the therapeutic window; any shorter and it accumulates. The “5 half-lives to clear” rule of thumb (about 99% gone) drops out of the same equation.
Application: the logistic equation#
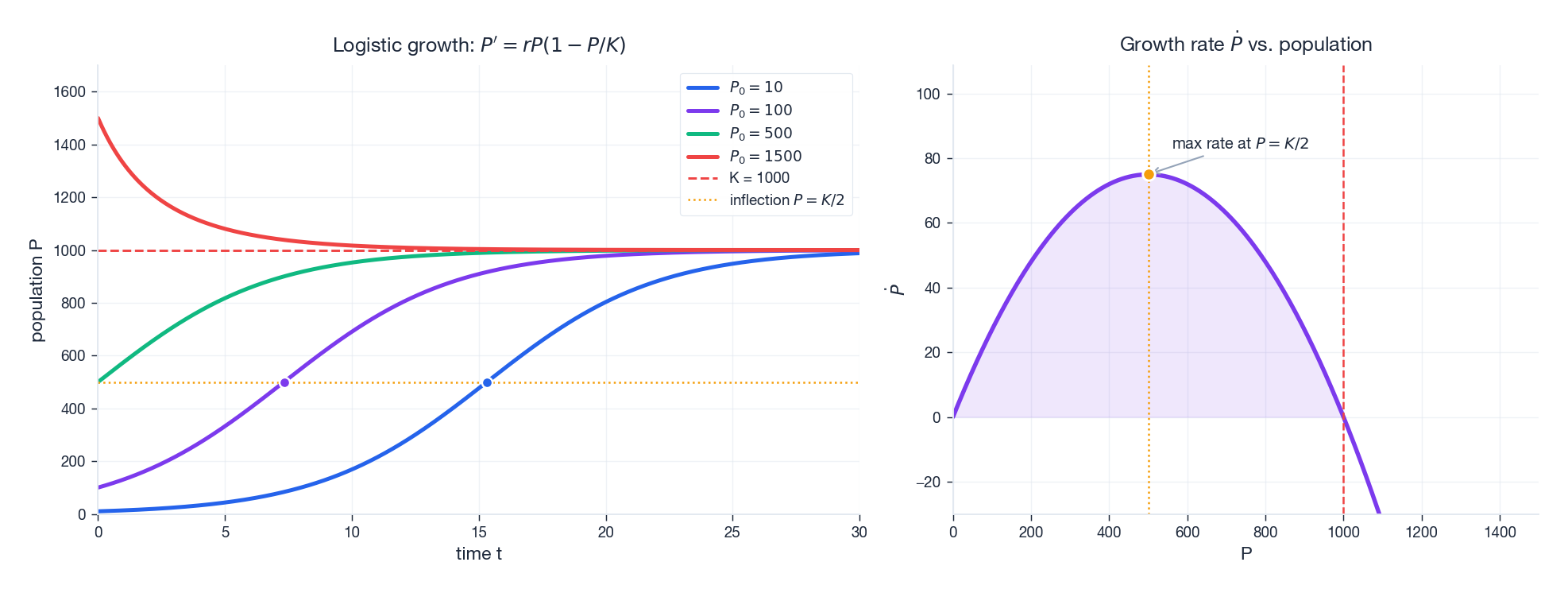
$$\frac{dP}{dt} = r P\left(1 - \frac{P}{K}\right).$$ $$\int \!\left(\frac{1}{P} + \frac{1/K}{1 - P/K}\right)\,dP \;=\; \int r\,dt,$$ $$P(t) \;=\; \frac{K}{1 + \left(\dfrac{K}{P_0} - 1\right)e^{-rt}}.$$Three structural facts fall out of the equation itself, before you ever solve it:
- $P \ll K$ : the bracket is $\approx 1$ , so growth is nearly exponential.
- $P = K/2$ : the right-hand side is $rK/4$ , the maximum possible rate.
- $P \to K$ : the bracket tends to zero — population saturates.
The right-hand panel below visualises this: the growth rate $\dot P$ as a function of $P$ is a downward parabola with peak at $K/2$ and roots at $P=0$ and $P=K$ .
First-order linear equations: the integrating factor#
Standard form#
$$\frac{dy}{dx} + P(x)\,y \;=\; Q(x).$$This is the workhorse of applied math. Whenever a quantity changes in proportion to itself plus an external forcing term, you get this shape.
The trick#
$$\mu(x) \;=\; e^{\int P(x)\,dx},$$ $$\frac{d}{dx}\bigl[\mu(x)\,y\bigr] \;=\; \mu(x)\,Q(x).$$ $$\boxed{\,y(x) \;=\; \frac{1}{\mu(x)} \left[\int \mu(x)\,Q(x)\,dx + C\right].\,}$$That’s the entire method. Why does it work? $\mu$ is engineered so that $\mu' = \mu P$ , exactly what the product rule demands.
Worked example: $y' + 2xy = x$ #
| Step | Computation | Result |
|---|---|---|
| 1. Identify | $P = 2x$ , $\;Q = x$ | — |
| 2. Integrating factor | $\mu = \exp\!\int 2x\,dx$ | $\mu = e^{x^2}$ |
| 3. Multiply | LHS becomes $\frac{d}{dx}[e^{x^2}y]$ | RHS $= x e^{x^2}$ |
| 4. Integrate | $\int x e^{x^2} dx = \tfrac12 e^{x^2}$ | $e^{x^2}y = \tfrac12 e^{x^2} + C$ |
| 5. Solve | divide by $e^{x^2}$ | $y = \tfrac12 + C e^{-x^2}$ |
As $x \to \pm\infty$ the term $C e^{-x^2}$ vanishes, so every solution funnels into the equilibrium $y = 1/2$ . The constant of integration only matters in a transient near the origin.
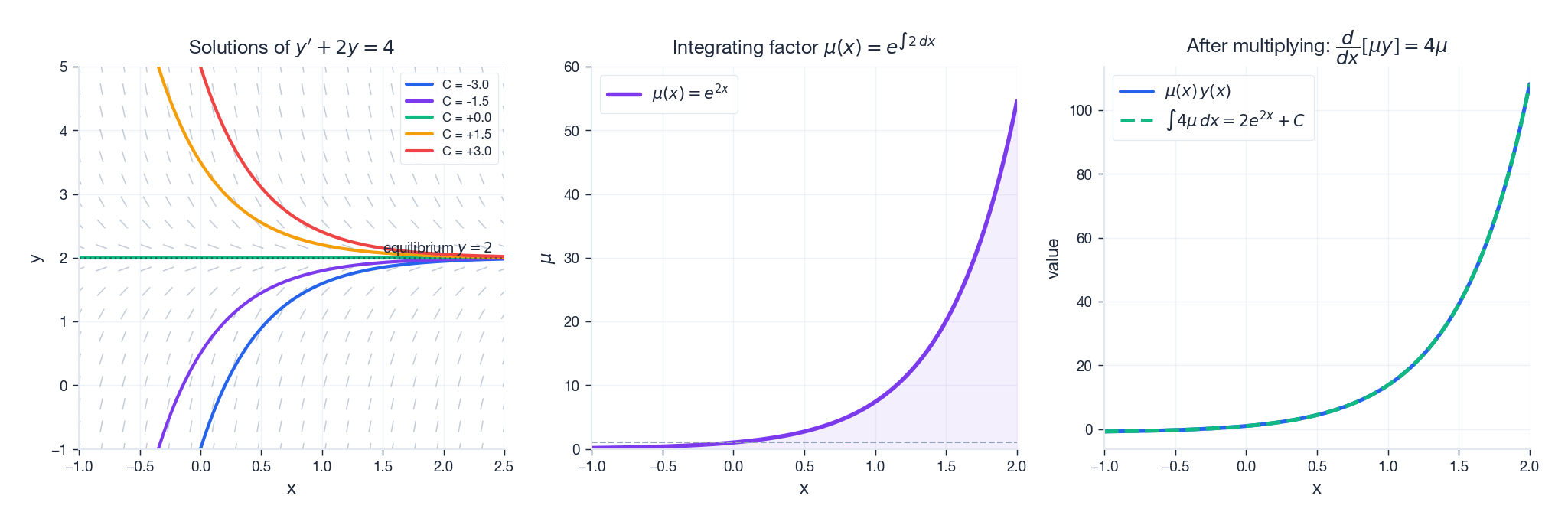
What the integrating factor does visually#
Three side-by-side panels make it obvious. We pick $y' + 2y = 4$ (so $P = 2$ , $\mu = e^{2x}$ , equilibrium $y=2$ ).
Application: charging an RC circuit#
$$RC\,\frac{dV_c}{dt} + V_c \;=\; V_s.$$ $$V_c(t) \;=\; V_s\bigl(1 - e^{-t/\tau}\bigr), \qquad \tau = RC.$$The time constant $\tau$ is what every electrical engineer memorises:
| Time | $V_c/V_s$ | Practical reading |
|---|---|---|
| $\tau$ | 63.2% | “one time constant” |
| $3\tau$ | 95.0% | usable as charged in most logic |
| $5\tau$ | 99.3% | considered “fully charged” |
Same formula, with a sign flip and $V_s = 0$ , governs discharging — and explains why your camera flash takes a noticeable second to recharge between shots.
Exact equations#
The geometric idea#
$$M(x,y)\,dx + N(x,y)\,dy = 0.$$ $$\frac{\partial F}{\partial x} = M, \qquad \frac{\partial F}{\partial y} = N.$$ $$F(x,y) \;=\; C.$$The solution curves are the level sets of $F$ . That is the whole picture, and it is profound: solving the ODE has been replaced by recovering a scalar function whose contour map is the solution family.
The exactness test#
$$\boxed{\,\dfrac{\partial M}{\partial y} \;=\; \dfrac{\partial N}{\partial x}.\,}$$If this fails, the equation is not exact (yet — see §3.4).
Solving an exact equation, step by step#
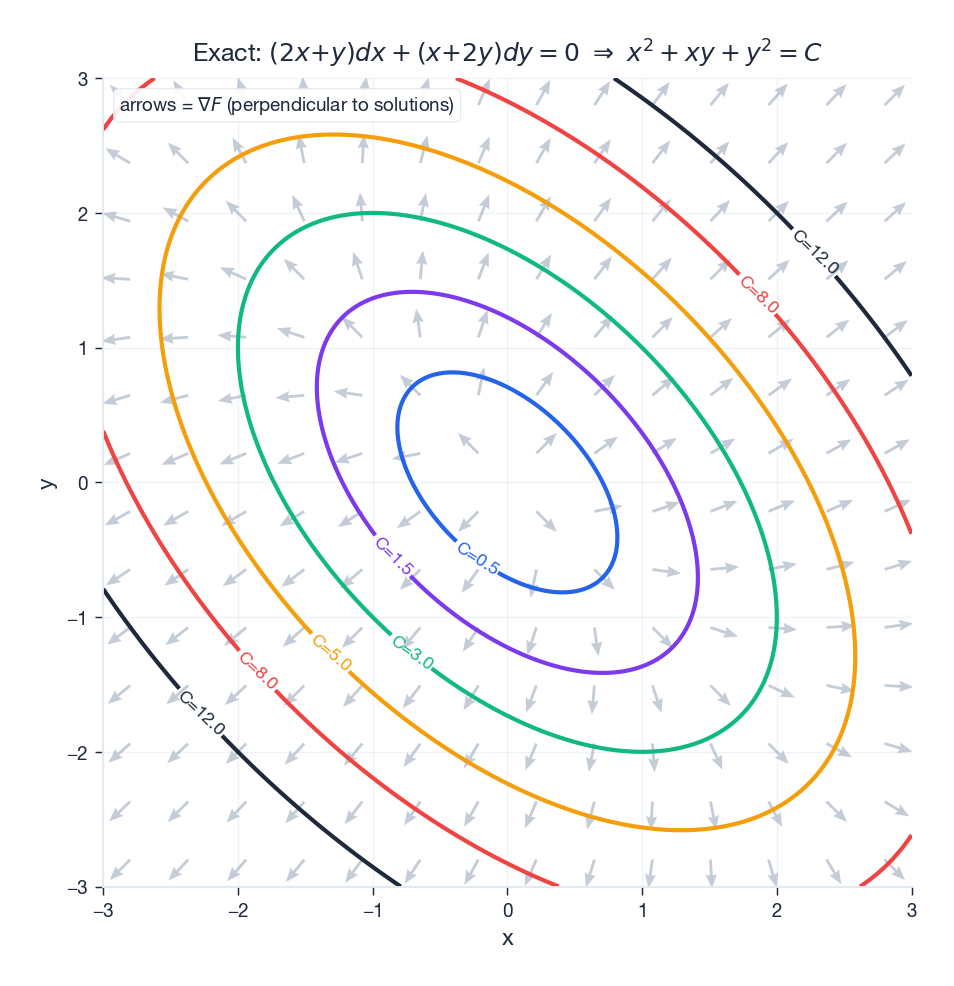
Take $(2x + y)\,dx + (x + 2y)\,dy = 0$ . Check exactness: $M_y = 1 = N_x$ . Good. Now reconstruct $F$ :
- Integrate $M$ with respect to $x$ : $\;F = x^2 + xy + g(y)$ .
- Differentiate with respect to $y$ and match $N$ : $\;x + g'(y) = x + 2y \Rightarrow g'(y) = 2y \Rightarrow g(y) = y^2$ .
- Therefore $F(x,y) = x^2 + xy + y^2$ , and the solution family is $x^2 + xy + y^2 = C$ .
Geometrically these are tilted ellipses. The figure below overlays the gradient field $\nabla F = (M, N)$ on the level curves; the gradient is everywhere perpendicular to the level set, which is the formal way of saying that $\nabla F$ tells you “uphill” while the solution curve stays at the same height.
Salvage: making a non-exact equation exact#
If $M_y \neq N_x$ , multiply by $\mu(x,y)$ and look for a $\mu$ that fixes things. Two common cases admit closed forms:
| Condition | Use |
|---|---|
| $(M_y - N_x)/N$ depends only on $x$ | $\mu(x) = \exp\!\int \dfrac{M_y - N_x}{N}\,dx$ |
| $(N_x - M_y)/M$ depends only on $y$ | $\mu(y) = \exp\!\int \dfrac{N_x - M_y}{M}\,dy$ |
This is the same construction as the linear-equation integrating factor — in fact, the linear method is a special case of this one.
Bernoulli equations#
The shape#
$$\frac{dy}{dx} + P(x)\,y \;=\; Q(x)\,y^{n}, \qquad n \neq 0, 1.$$When $n = 0$ it’s already linear; when $n = 1$ it’s separable. The interesting range is everything else, where the $y^n$ term ruins linearity.
The substitution#
$$\frac{dv}{dx} + (1-n)P(x)\,v \;=\; (1-n)Q(x).$$That is linear in $v$ . Solve it with the integrating factor of §2, then convert back via $y = v^{1/(1-n)}$ .
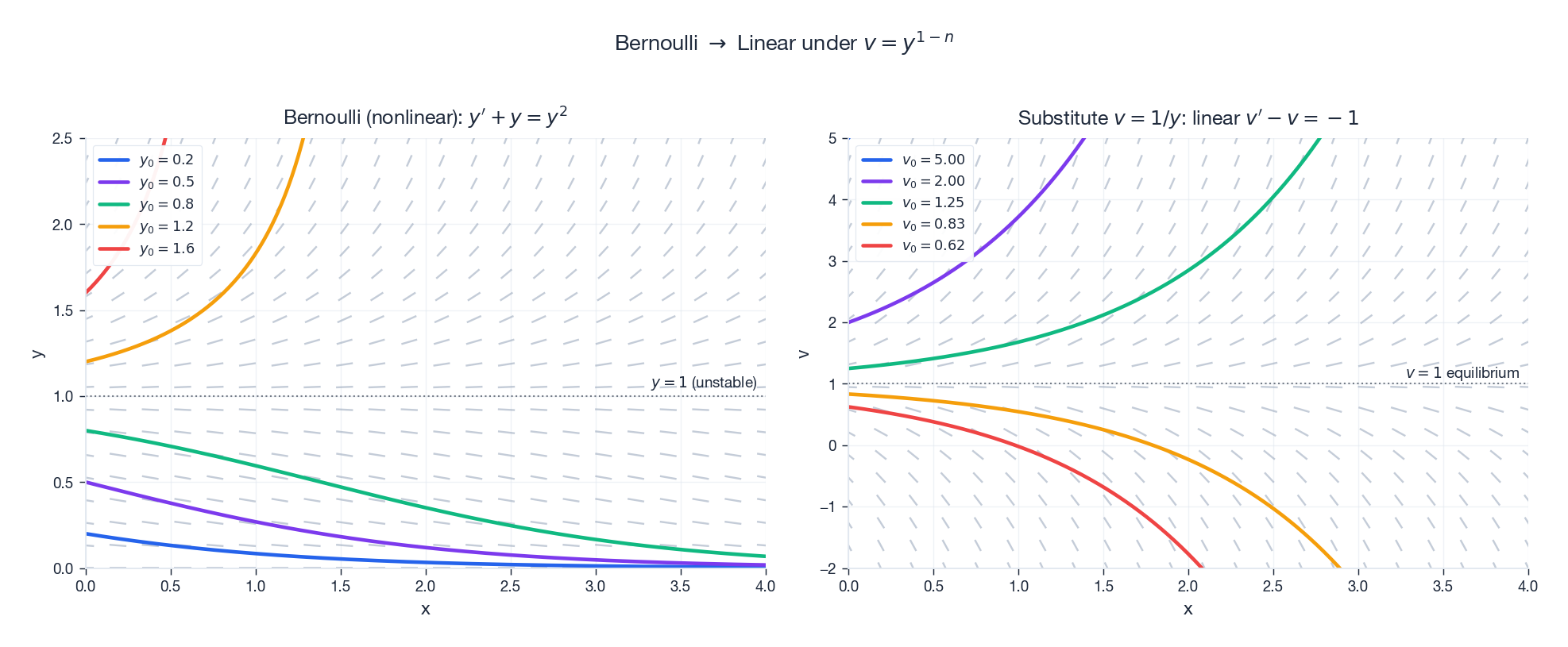
What the substitution does geometrically#
Take $y' + y = y^2$ (so $n = 2$ , $v = 1/y$ ). The substitution turns it into the linear equation $v' - v = -1$ , whose solutions are exponentials around the equilibrium $v = 1$ . In $v$ -space the family is straight and orderly; in the original $y$ -space it is curved and contains a finite-time blow-up.
The same substitution trick recovers the logistic equation: it is Bernoulli with $n = 2$ , $P(t) = -r$ , $Q(t) = -r/K$ . So the messy partial-fraction integration of §1.4 is really just an integrating-factor calculation in disguise.
A worked application: salt in a tank#
This is the classic “compartment model” — the same skeleton you will meet again in epidemiology, pharmacokinetics and chemical engineering.
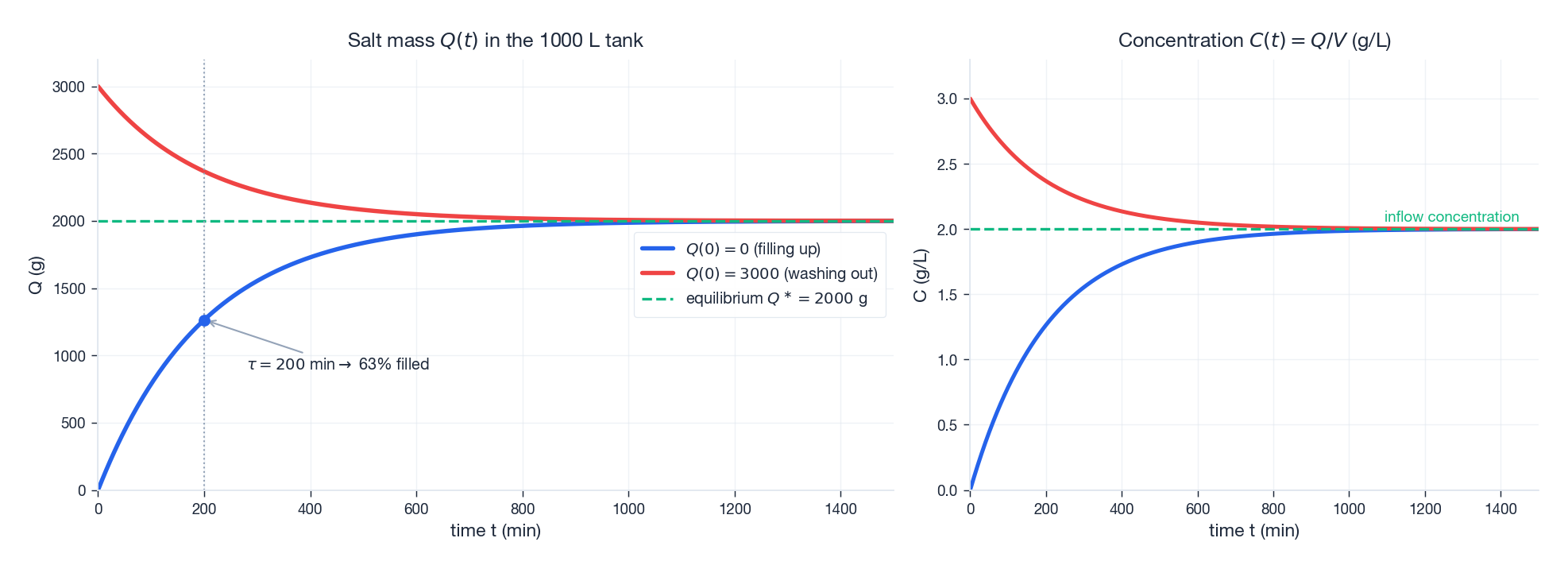
Setup. A 1000 L tank starts with pure water. Brine with concentration $2$ g/L flows in at $5$ L/min. The tank is well-stirred and drains at the same rate, so the volume stays constant. Find the salt mass $Q(t)$ .
$$ \underbrace{\frac{dQ}{dt}}_{\text{rate of change}} = \underbrace{5 \cdot 2}_{\text{in: g/min}} \,-\, \underbrace{5 \cdot \tfrac{Q}{1000}}_{\text{out: g/min}} = 10 - \tfrac{Q}{200}, \qquad Q(0) = 0. $$ $$Q(t) \;=\; 2000\bigl(1 - e^{-t/200}\bigr).$$Read the answer. The equilibrium is $Q^\ast = 2000$ g, i.e. concentration $2$ g/L — exactly the inflow concentration. The time constant $\tau = 200$ min controls how fast we get there. The same equation with $Q(0) > Q^\ast$ describes a salty tank being washed clean — the curves below show both regimes converging to the same equilibrium.
Numerical methods preview#
Closed-form tricks fail the moment $f(x,y)$ is messy enough — and most real-world equations are. The answer is to step along the slope field.
Euler’s method#
$$y_{n+1} \;=\; y_n + h\,f(t_n, y_n).$$- Local truncation error per step: $O(h^2)$ .
- Global error after $1/h$ steps: $O(h)$ . Hence “first-order method”.
Cheap, easy, often inadequate.
Runge–Kutta 4 (RK4)#
$$ k_1 = f(t_n, y_n), \qquad k_2 = f\!\left(t_n + \tfrac{h}{2},\, y_n + \tfrac{h}{2}k_1\right), $$ $$ k_3 = f\!\left(t_n + \tfrac{h}{2},\, y_n + \tfrac{h}{2}k_2\right), \qquad k_4 = f(t_n + h,\, y_n + h k_3), $$ $$y_{n+1} \;=\; y_n + \frac{h}{6}\bigl(k_1 + 2k_2 + 2k_3 + k_4\bigr).$$Global error $O(h^4)$ — four orders of magnitude better than Euler at the same step size, for the cost of three extra evaluations.
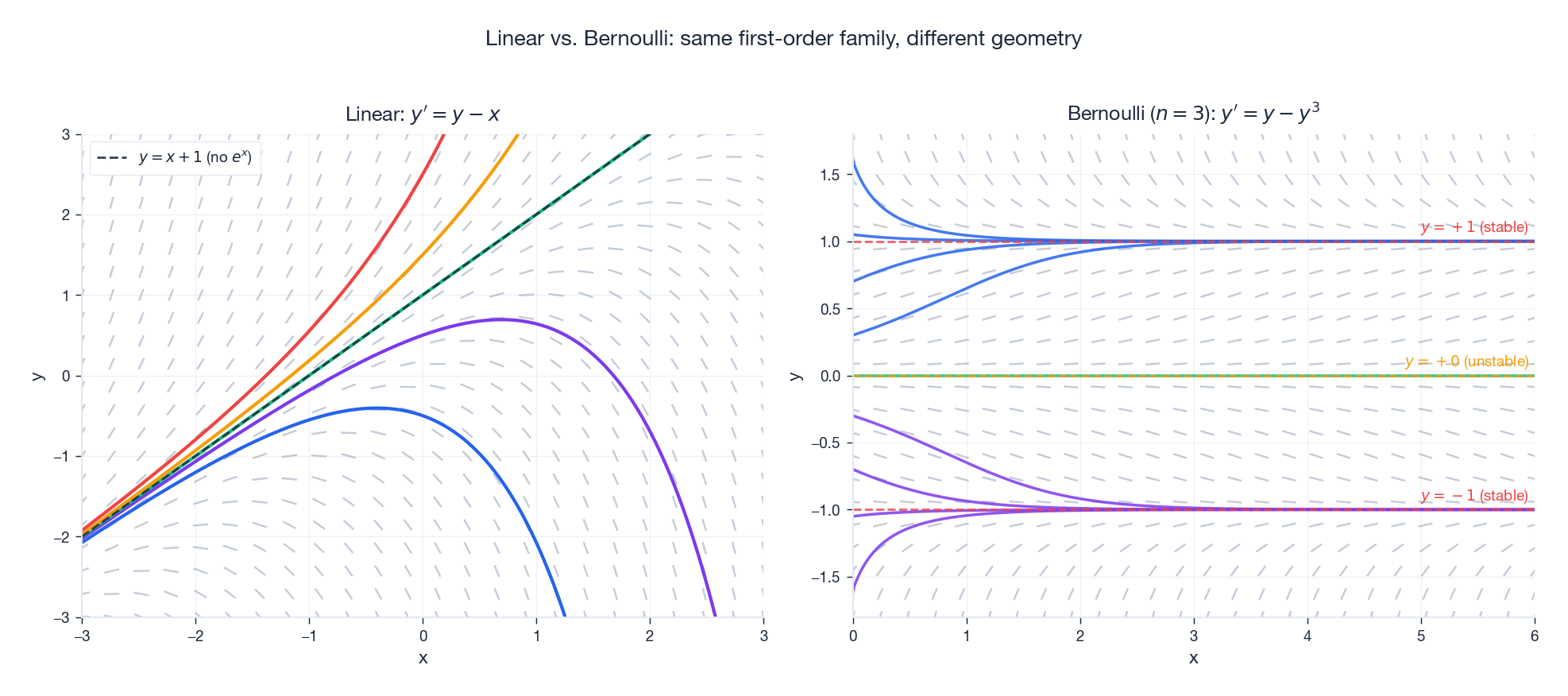
Slope fields tell you what the integrator will see#
Before you reach for a numerical solver, look at the right-hand side. Two superficially similar equations can have radically different long-term behaviour:
SciPy in three lines#
Newton’s law of cooling: $T' = -k(T - T_{\text{env}})$ with $T(0) = 90$ °C, $T_{\text{env}} = 20$ °C, $k = 0.1$ /min.
| |
solve_ivp adapts the step size automatically. For most problems you do not need to write your own RK4; you need to know when the standard solver will struggle (stiff systems — see Chapter 11
).
Summary: the four-question filter#
When you meet a first-order equation, run it through these in order — the first “yes” tells you the method.
| Question | If yes | Method |
|---|---|---|
| Can I write it as $y' = g(x)\,h(y)$ ? | Separable | Move terms, integrate both sides |
| Is it $y' + P(x)y = Q(x)$ ? | Linear | Integrating factor $\mu = e^{\int P\,dx}$ |
| Is it $M\,dx + N\,dy = 0$ with $M_y = N_x$ ? | Exact | Reconstruct potential $F$ ; solution is $F = C$ |
| Is it $y' + Py = Qy^n$ with $n \notin \{0,1\}$ ? | Bernoulli | Substitute $v = y^{1-n}$ , then go to row 2 |
| None of the above? | — | Numerical methods (Chapter 11 ) or look for a clever substitution |
The four methods are not independent. The integrating factor for a linear equation is the special case of the integrating factor that fixes a non-exact equation. The Bernoulli substitution reduces nonlinear to linear. So learning these four well is really learning one idea — find the change of variable that turns the equation into something that integrates by inspection — applied four ways.
Exercises#
Basic.
- Solve $y' = y^2 \sin x$ with $y(0) = 1$ . Where does the solution blow up?
- Solve $y' + y = e^{-x}$ . Identify the transient and steady-state parts.
- Verify that $(2xy + 3)\,dx + (x^2 + 1)\,dy = 0$ is exact and solve it.
- A 1000 L tank holds 50 kg of dissolved salt. Pure water enters at 10 L/min; the well-mixed solution leaves at the same rate. Find $Q(t)$ and the time to halve the salt mass.
Advanced.
- Solve the Bernoulli equation $y' + y = y^3$ . Sketch the phase line and identify the equilibria.
- For $y' = 3y^{2/3}$ with $y(0) = 0$ , exhibit at least two distinct solutions on $[0, \infty)$ . Why does this not contradict the existence-uniqueness theorem?
- A bacterial population obeys $P' = 0.5\,P(1 - P/1000)$ with $P(0) = 50$ . Find $P(t)$ explicitly and compute the time at which the growth rate is maximal.
Programming.
- Implement Euler and RK4 from scratch. Compare their global error on $y' = -y$ , $y(0) = 1$ over $[0, 5]$ at step sizes $h = 0.5, 0.1, 0.01$ . Plot $\log(\text{error})$ versus $\log(h)$ and verify the predicted slopes 1 and 4.
- Reproduce the slope-field comparison of §6.3 yourself: use
numpy.meshgridandmatplotlib.pyplot.quiverfor the field, thenscipy.integrate.solve_ivpfor the trajectories. Try $y' = y - y^5$ and identify the equilibria.
References#
- Boyce & DiPrima, Elementary Differential Equations and Boundary Value Problems, Wiley (2012). The standard undergraduate reference; Chapters 2–3 cover everything above with classical rigour.
- Zill, A First Course in Differential Equations with Modeling Applications, Cengage (2017). Heavier on applications; the mixing and circuit examples are particularly clean.
- Strogatz, Nonlinear Dynamics and Chaos, Westview (2014). Chapter 2’s phase-line treatment of the logistic equation is essential reading after this chapter.
- SciPy documentation: scipy.integrate
. The reference for
solve_ivp, including its choice of methods (RK45, Radau, BDF) and event handling.
This is Part 2 of the 18-part series on Ordinary Differential Equations.
- Part 1: Origins and Intuition
- Part 2: First-Order Methods (current)
- Part 3: Higher-Order Linear Theory
- Part 4: The Laplace Transform
- Part 5: Power Series and Special Functions
- Part 6: Linear Systems and the Matrix Exponential
- Part 7: Stability Theory
- Part 8: Nonlinear Systems and Phase Portraits
- Part 9: Chaos Theory and the Lorenz System
- Part 10: Bifurcation Theory
- Part 11: Numerical Methods
- Part 12: Boundary Value Problems
- Part 13: Introduction to PDEs
- Part 14: Epidemic Models
- Part 15: Population Dynamics
- Part 16: Fundamentals of Control Theory
- Part 17: Physics and Engineering Applications
- Part 18: Frontiers and Series Finale
ODE Foundations 18 parts
- 01 Ordinary Differential Equations (1): Origins and Intuition
- 02 Ordinary Differential Equations (2): First-Order Methods you are here
- 03 Ordinary Differential Equations (3): Higher-Order Linear Theory
- 04 Ordinary Differential Equations (4): The Laplace Transform
- 05 Ordinary Differential Equations (5): Power Series and Special Functions
- 06 Ordinary Differential Equations (6): Linear Systems and the Matrix Exponential
- 07 Ordinary Differential Equations (7): Stability Theory
- 08 Ordinary Differential Equations (8): Nonlinear Systems and Phase Portraits
- 09 Ordinary Differential Equations (9): Chaos Theory and the Lorenz System
- 10 Ordinary Differential Equations (10): Bifurcation Theory
- 11 Ordinary Differential Equations (11): Numerical Methods
- 12 Ordinary Differential Equations (12): Boundary Value Problems
- 13 Ordinary Differential Equations (13): Introduction to Partial Differential Equations
- 14 Ordinary Differential Equations (14): Epidemic Models and Epidemiology
- 15 Ordinary Differential Equations (15): Population Dynamics
- 16 Ordinary Differential Equations (16): Fundamentals of Control Theory
- 17 Ordinary Differential Equations (17): Physics and Engineering Applications
- 18 Ordinary Differential Equations (18): Frontiers and Series Finale