
优化理论(六):复合优化与近端方法
系统讲解近端算子的理论与应用:凸分析基础、Moreau 包络、常见近端闭式解,以及 ISTA/FISTA、ADMM 等算法中的实际用法。
当目标函数包含不可导项(如稀疏正则、TV 正则或约束集的指示函数),又或者约束难以直接处理时,“直接上梯度下降”往往会卡住,要么在不可导点处没有梯度可用,要么每一步都破坏可行性。近端算子(proximal operator) 提供了一种精巧而优美的解决方案:把每次更新理解为“先对光滑部分走一步,再通过一个带二次惩罚的小规模优化,将当前点拉回具有特定结构的解空间”。
本文将从凸分析所需的最小工具集出发,推导 Moreau 包络与近端映射的核心性质,列举实际中高频使用的闭式近端算子,并将其嵌入 ISTA、FISTA、ADMM、SVM 和稀疏优化等具体算法中,重点解释每个组件为何有效、何时一种方法优于另一种,以及实现中最容易踩的坑。
一旦目标函数里出现一项不可导的东西,L1 正则、TV 正则、或者一个集合的指示函数,梯度下降就开始打嗝:要么在尖点处没有梯度可用,要么每走一步都把约束破坏掉。
近端算子(proximal operator) 是处理这种情况的标准答案,但第一次接触它的人很容易被一堆术语吓到:Moreau 包络、共轭、ISTA、ADMM……听上去全是新名词。
这篇文章我想做的事情是:先用一句话告诉你它在干嘛,
“先对光滑那部分走一小步,再用一个带二次惩罚的小优化把当前点拉回到具有特定结构的区域。”
然后再去推那些性质和闭式解。等你看到 ISTA、FISTA、ADMM 这些算法的骨架时,会发现它们其实都是同一个动作的不同包装。
你将学到什么#
- 凸分析最小工具集:凸集、凸函数、子梯度
- 近端算子:定义、几何直觉、四条核心性质
- 三个日常高频闭式近端:软阈值、投影、二次收缩
- Moreau 包络:如何将非光滑函数光滑化,及其驱动 ISTA 的梯度恒等式
- ISTA:最简形式的近端梯度算法
- FISTA:通过动量加速达到 $O(1/k^2)$ 收敛率
- LASSO 端到端求解:从理论到清晰的 Python 实现
- 一页讲清 ADMM,及其与近端梯度族的关系
- 常见实现陷阱:步长选择、Lipschitz 常数估计、收敛性判断
前置知识#
- 多元微积分(梯度、链式法则)
- 线性代数基础(范数、内积、特征值)
- 一点凸优化常识(梯度下降、强凸性)
凸分析基础#
在讨论近端算子前,需先厘清三个基本概念:凸集、凸函数和子梯度。后续所有关键性质(如非扩张性、闭式解存在性、收敛速率)都建立在这三者之上。
凸集与凸函数#
$$\theta x + (1 - \theta) y \in C.$$即任意两点间的线段完全包含在 $C$ 中。
$$f\!\left(\theta x + (1 - \theta) y\right) \le \theta f(x) + (1 - \theta) f(y).$$几何上,函数图像上任意两点间的弦始终位于图像上方(“碗状”)。
两条关键事实:
- 局部最小即全局最小:凸函数的任一局部极小点都是全局最小点。
- 支撑超平面存在性:凸集的每个边界点、凸函数的每个定义点处都存在支撑超平面,这正是子梯度的来源。
子梯度#
可微凸函数处处有唯一梯度 $\nabla f(x)$ 。但像 $|x|$ 或 hinge 损失 $\max(0, 1 - t)$ 这类函数在“折点”处不可导,此时需引入子梯度。
$$f(y) \ge f(x) + \langle g,\, y - x \rangle.$$这意味着 $g$ 定义了一个位于函数图像下方、且在 $(x, f(x))$ 处接触图像的支撑超平面。所有这样的 $g$ 构成的集合称为次微分 $\partial f(x)$ 。
$$ \partial |t| = \begin{cases} \{+1\}, & t > 0,\ \{-1\}, & t < 0,\ [-1, +1], & t = 0. \end{cases} $$在 $t = 0$ 处,次微分是一个区间,这正是后文软阈值算子产生“死区”(输出为零的区间)的根本原因。
性质:
- 若 $f$ 在 $x$ 处可微,则 $\partial f(x) = \{\nabla f(x)\}$ 。
- $\partial f(x)$ 总是凸集(且当 $f$ 为闭真凸函数时,在 $\mathrm{dom}\,f$ 内部非空)。
- 最优性条件:$x^\star$ 是 $f$ 的全局最小点当且仅当 $0 \in \partial f(x^\star)$ 。这一条件推广了“梯度为零”,是后续所有推导的核心工具。
近端算子#
定义与几何直觉#
$$ \mathrm{prox}_{\lambda f}(v) \;=\; \arg\min_{x \in \mathbb{R}^n}\left\{\, f(x) + \frac{1}{2\lambda} \|x - v\|_2^2 \,\right\}. $$当 $f$ 闭真凸时,该最小化问题有唯一解(目标函数强凸)。
直观理解:$\mathrm{prox}_{\lambda f}(v)$ 在“使 $f$ 尽可能小”和“尽量靠近 $v$ ”之间做权衡,$\lambda$ 控制这一权衡:
- $\lambda \to 0$ :远离 $v$ 的惩罚极大,故 $\mathrm{prox}_{\lambda f}(v) \to v$ ;
- $\lambda \to \infty$ :可自由最小化 $f$ ,故 $\mathrm{prox}_{\lambda f}(v) \to \arg\min f$ 。

左图展示了这一权衡:蓝色为 $f$ ,灰色为二次锚定项,紫色为其和;橙色点即为 $\mathrm{prox}_{\lambda f}(v)$ 。右图暂且按下不表,待介绍 Moreau 包络时再回看。
四条核心性质#
以下四条性质是后续所有算法分析的基石。
$$\frac{1}{\lambda}(v - x^\star) \in \partial f(x^\star) \;\;\Longleftrightarrow\;\; v \in x^\star + \lambda\, \partial f(x^\star).$$(2) 不动点刻画:$x^\star$ 最小化 $f$ 当且仅当 $x^\star = \mathrm{prox}_{\lambda f}(x^\star)$ 。这使得最小化问题可转化为不动点迭代。
$$\|\mathrm{prox}_{\lambda f}(u) - \mathrm{prox}_{\lambda f}(v)\|_2 \le \|u - v\|_2.$$更强的“强”版本表明 $\mathrm{prox}_{\lambda f}$ 是 $\tfrac{1}{2}$ -平均映射,这是 ISTA 收敛性的主要工具。
$$\bigl[\mathrm{prox}_{\lambda f}(v)\bigr]_i = \mathrm{prox}_{\lambda f_i}(v_i).$$对于 $\ell_1$ 范数、盒约束等逐坐标函数,其近端算子可完全并行计算,这正是 LASSO 能扩展至百万维特征的关键原因。
三个常用闭式近端算子#
$\ell_1$ 范数:软阈值#
$$\min_{x_i} |x_i| + \frac{1}{2\lambda}(x_i - v_i)^2.$$ $$ \bigl[\mathrm{prox}_{\lambda \|\cdot\|_1}(v)\bigr]_i \;=\; \mathrm{soft}_\lambda(v_i) \;=\; \mathrm{sign}(v_i) \cdot \max\!\bigl(|v_i| - \lambda,\, 0\bigr). $$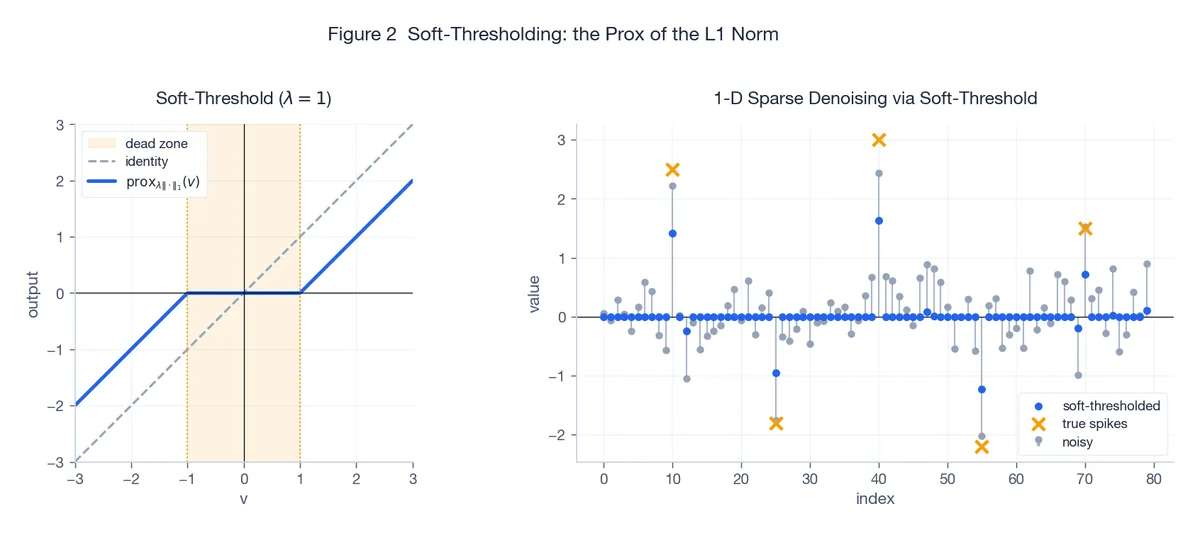
- 左图:当 $|v| \le \lambda$ (“死区”)时输出精确为零;超出此范围时,$v$ 被收缩 $\lambda$ 向零(注意是收缩而非截断)。
- 右图:对含噪信号应用一次软阈值,小幅噪声被压至零,尖峰则保留并轻微收缩,这正是 LASSO 将无关系数精确归零的机制。
实现提示:NumPy 中一行即可向量化实现:np.sign(v) * np.maximum(np.abs(v) - lam, 0.0)。
指示函数:投影#
$$ \iota_C(x) = \begin{cases} 0, & x \in C, \ +\infty, & x otin C, \end{cases} $$ $$\mathrm{prox}_{\lambda \iota_C}(v) = \arg\min_{x \in C} \tfrac{1}{2}\|x - v\|_2^2 = P_C(v).$$注意结果与 $\lambda$ 无关(因指示函数取值仅为 $0$ 或 $+\infty$ )。这表明“投影梯度法”是“近端梯度法”的特例,硬约束等价于无穷大的惩罚。
常见投影:
- $\ell_2$ 球 $\{x : \|x\|_2 \le r\}$ :$P(v) = v \cdot \min(1, r / \|v\|_2)$ 。
- $\ell_\infty$ 球 $\{x : \|x\|_\infty \le 1\}$ :$P(v)_i = \mathrm{clip}(v_i, -1, 1)$ 。
- 非负象限 $\mathbb{R}^n_{+}$ :$P(v) = \max(v, 0)$ (即 ReLU)。
- 单纯形 / $\ell_1$ 球:需排序,复杂度 $O(n \log n)$ ,但已有成熟算法。
平方范数:线性收缩#
$$\mathrm{prox}_{\lambda f}(v) = \frac{v}{1 + \lambda}.$$这是朝原点的纯线性收缩,对应岭回归的正则形式。
$$\mathrm{prox}_{\lambda f}(v) = (I + \lambda Q)^{-1}(v - \lambda b),$$需解一个线性系统,当 $Q$ 稀疏或具特殊结构时仍很实用。
无闭式解时的应对策略#
并非所有 $f$ 都有闭式近端。常用备选方案包括:
- 对一阶最优条件使用半光滑牛顿法或 Newton-CG;
- 求解对偶问题,许多复合近端在对偶空间更易计算(见下文 Moreau 分解);
- 嵌入 ADMM,将难解的近端拆分为两个易解子问题。
Moreau 包络:光滑化非光滑函数#
定义与图像#
$$\widehat{f}_\lambda(x) \;=\; \min_{y \in \mathbb{R}^n}\left\{ f(y) + \frac{1}{2\lambda}\|y - x\|_2^2 \right\}.$$包络给出的是最小值(标量),而近端给出的是最小化点(向量)。二者源于同一优化问题,故关系紧密。
回到 Figure 1 右图:紫色和绿色曲线分别是 $f(x) = |x|$ 在 $\lambda = 0.5$ 和 $\lambda = 1.5$ 下的 Moreau 包络(即 Huber 函数)。原点处的“尖角”被光滑化为可微弧线,且最小值与最小化点保持不变。
三条关键性质#
$$\inf_x f(x) = \inf_x \widehat{f}_\lambda(x), \qquad \arg\min f = \arg\min \widehat{f}_\lambda.$$(2) $\widehat{f}_\lambda$ 是凸且 $\tfrac{1}{\lambda}$ -光滑的。即使 $f$ 处处不可导,$\widehat{f}_\lambda$ 也处处可微,且其梯度为 $\tfrac{1}{\lambda}$ -Lipschitz。
$$\nabla \widehat{f}_\lambda(x) \;=\; \frac{1}{\lambda}\bigl(x - \mathrm{prox}_{\lambda f}(x)\bigr).$$为何重要:它将“对包络做梯度下降”转化为“计算一次近端”,这正是 ISTA 的算法本质。
简要推导:令 $y^\star = \mathrm{prox}_{\lambda f}(x)$ 。一阶最优性给出 $0 \in \partial f(y^\star) + \tfrac{1}{\lambda}(y^\star - x)$ ,即 $\tfrac{1}{\lambda}(x - y^\star) \in \partial f(y^\star)$ 。对 $\widehat{f}_\lambda(x) = f(y^\star) + \tfrac{1}{2\lambda}\|y^\star - x\|^2$ 应用包络定理,因内层关于 $y$ 的偏导在最优处为零,仅剩 $\nabla_x \tfrac{1}{2\lambda}\|y - x\|^2 \big|_{y = y^\star} = \tfrac{1}{\lambda}(x - y^\star)$ 。
Moreau 分解#
$$v = \mathrm{prox}_{\lambda f}(v) + \lambda \cdot \mathrm{prox}_{f^* / \lambda}(v / \lambda).$$实践中,若 $f$ 的近端难算但 $f^*$ 的近端易算(或反之),可在易算侧进行计算。经典应用如核范数近端(SVD 软阈值)与谱范数投影之间的转换。
近端梯度:ISTA#
问题设定#
$$\min_{x \in \mathbb{R}^n} F(x) \;=\; g(x) + h(x),$$其中
- $g$ 凸、可微,且 $\nabla g$ 为 $L$ -Lipschitz(“光滑部分”),
- $h$ 凸、可能不可微,但 $\mathrm{prox}_{\lambda h}$ 易计算(“非光滑部分”)。
LASSO 是典型例子:$g(x) = \tfrac{1}{2}\|Ax - y\|_2^2$ 光滑,$h(x) = \mu \|x\|_1$ 可通过软阈值计算。
ISTA 迭代#
$$ \boxed{\;x_{k+1} \;=\; \mathrm{prox}_{\eta h}\!\bigl(x_k - \eta \nabla g(x_k)\bigr).\;} $$主化视角:用二次上界 $\widetilde{g}(x; x_k) = g(x_k) + \langle\nabla g(x_k), x - x_k \rangle + \tfrac{1}{2\eta}\|x - x_k\|_2^2$ 替代 $g$ ,然后最小化 $\widetilde{g}(x; x_k) + h(x)$ ,这恰好就是上述近端步骤。因此 ISTA 是 MM(主化-最小化)方法的一个实例。
步长选择:$\eta \le 1 / L$ ,其中 $L$ 是 $\nabla g$ 的 Lipschitz 常数。对 LASSO,$L = \|A\|_2^2$ (最大奇异值平方),实践中两三次幂迭代即可足够准确。
$$F(x_k) - F^\star \le \frac{\|x_0 - x^\star\|_2^2}{2\eta k} = O(1 / k).$$
Figure 3 展示了二维 LASSO 上的 ISTA 运行过程:灰色等高线为目标函数,橙线为稀疏轴($x_2 = 0$ )。从右上角紫星出发,ISTA 迭代点(蓝色折线)逐步逼近最优解,并精确落在 $x_2 = 0$ 上,软阈值诱导稀疏性的效果一目了然。
加速:FISTA#
算法#
$$ \begin{aligned} y_k &= x_k + \frac{t_{k-1} - 1}{t_k}\bigl(x_k - x_{k-1}\bigr), \ x_{k+1} &= \mathrm{prox}_{\eta h}\!\bigl(y_k - \eta \nabla g(y_k)\bigr), \ t_{k+1} &= \frac{1 + \sqrt{1 + 4 t_k^2}}{2}. \end{aligned} $$初始化 $t_0 = 1$ ,$x_0 = x_{-1}$ 。
收敛速率:$F(x_k) - F^\star \le \dfrac{2 \|x_0 - x^\star\|_2^2}{\eta (k + 1)^2} = O(1/k^2)$ 。

Figure 4 在双对数坐标下绘制了 60 维 LASSO 上 ISTA 与 FISTA 的次优间隙。两条参考虚线($1/k$ 和 $1/k^2$ )几乎与实测曲线平行,加速效果真实存在,且在前 50 次迭代内,FISTA 已比 ISTA 快约一个数量级。
实现要点#
- 重启策略:$t_k$ 单调递增可能导致过度外推。简单有效的修复是函数值重启:若 $F(x_{k+1}) > F(x_k)$ ,则重置 $t_k = 1$ 。实践中常带来 2–3 倍额外加速。
- 强凸情形:若 $g$ 还是 $\mu$ -强凸的,APGD 等变体可实现线性收敛 $(1 - \sqrt{\mu/L})^k$ 。
- 近端近似:即使近端仅近似求解,只要残差以 $1/k^{3/2}$ 衰减,FISTA 仍保持加速率。
应用:求解 LASSO#
问题与解的几何特性#
$$\min_x \;\tfrac{1}{2}\|Ax - y\|_2^2 + \mu \|x\|_1.$$关键现象:随着 $\mu$ 增大,越来越多系数被精确推至零,这使 LASSO 同时具备拟合与特征选择能力。

Figure 5 展示经典的LASSO 解路径:横轴为 $\mu$ (对数刻度),纵轴为各系数值。紫色实线对应 4 个真实非零特征,灰色虚线对应 8 个真实零特征。
- 小 $\mu$ :所有系数非零(接近 OLS 解);
- 大 $\mu$ :灰色(无关)特征率先归零,紫色(相关)特征最后消失;
- 通过交叉验证选择 $\mu$ ,可获得稀疏且预测性能良好的模型。
清晰的 ISTA / FISTA 实现#
| |
实践建议:
- $L = \|A\|_2^2$ 最好用幂迭代估计(避免完整 SVD);
- 收敛判断用相对变化量而非梯度范数(折点处梯度不存在);
- 若需计算多个 $\mu$ 的解路径,按 $\mu$ 从大到小顺序并使用热启动(warm start),上一解作为下一初值,可大幅提速。
子梯度法 vs 近端法#
$$x_{k+1} = x_k - \eta_k g_k, \quad g_k \in \partial F(x_k),$$但其收敛率仅为 $O(1/\sqrt{k})$ ,且需递减步长 $\eta_k = O(1/\sqrt{k})$ 才能保证收敛。
方法对比:
| 方法 | 所需结构 | 收敛率(凸) | 实现难度 | 备注 |
|---|---|---|---|---|
| 子梯度法 | 任意凸 $F$ | $O(1/\sqrt{k})$ | 低 | 通用但慢 |
| ISTA | $g$ 光滑 + $h$ 易 prox | $O(1/k)$ | 低 | LASSO 默认选择 |
| FISTA | 同 ISTA | $O(1/k^2)$ | 中 | 大规模首选 |
| ADMM | $\min g(x) + h(z)$ s.t. $Ax + Bz = c$ | $O(1/k)$ (一般凸) | 中 | 适用于可拆分复合问题 |
实践建议:只要非光滑部分可分离且近端易算,优先使用近端方法,实际问题中通常能获得数量级的速度提升。
一页讲清 ADMM#
$$\min_{x, z}\; g(x) + h(z) \quad \text{s.t.}\quad Ax + Bz = c,$$ $$ \begin{aligned} x_{k+1} &= \arg\min_x\; g(x) + \tfrac{\rho}{2}\|Ax + Bz_k - c + u_k\|_2^2, \ z_{k+1} &= \arg\min_z\; h(z) + \tfrac{\rho}{2}\|Ax_{k+1} + Bz - c + u_k\|_2^2, \ u_{k+1} &= u_k + Ax_{k+1} + Bz_{k+1} - c. \end{aligned} $$每个子问题仅含一个非光滑项,故可用单次近端求解。
LASSO 的 ADMM 形式:将约束写为 $x = z$ 。$x$ -更新为闭式岭回归解,$z$ -更新为软阈值,简洁明了。
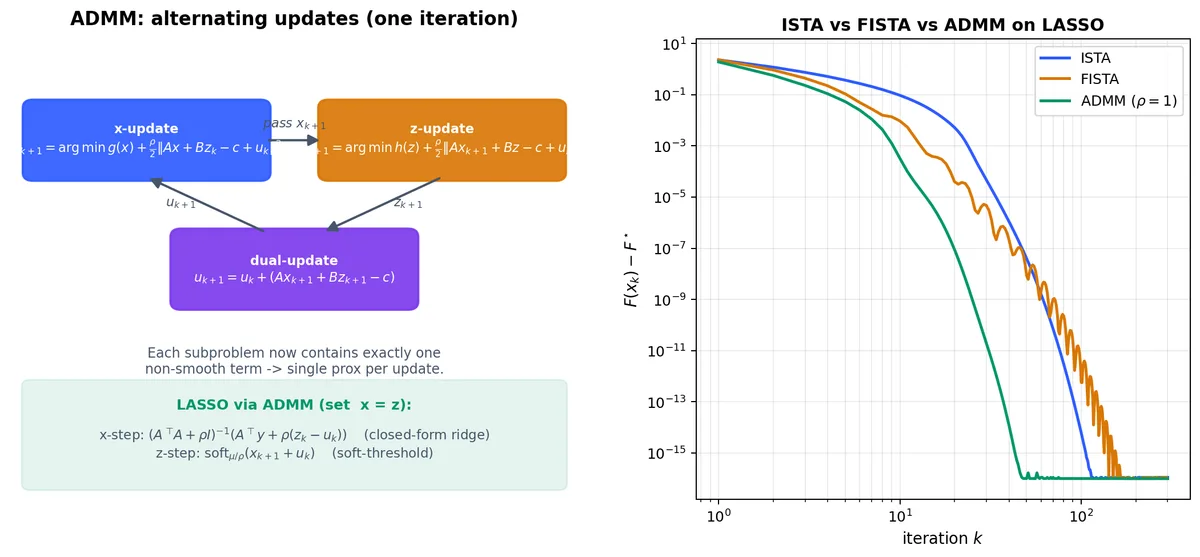
图 6 左侧展示一次完整 ADMM 迭代:$x$ -更新处理光滑项 $g$ 与二次惩罚(LASSO 中为闭式岭回归),$z$ -更新对 $h$ 做单次近端(LASSO 中为软阈值),对偶变量 $u$ 累积残差 $Ax+Bz-c$ 。右侧在同一 60 维 LASSO 实例上比较 ISTA、FISTA 与 ADMM($\rho=1$ ):ADMM 初期与 FISTA 相当,并最先达到机器精度,当子问题本身易解时,拆分策略往往更优。
ADMM 的优势:
- 适用于两个非光滑项之和(如 $\ell_1$ + 全变分);
- 天然支持分布式计算(共识 ADMM);
- 对一般凸问题为 $O(1/k)$ ,且常数常小于 ISTA。
ADMM 的代价:需选择 $\rho$ ,且 $x$ -更新需解线性系统。
收敛性:实战考量#
ISTA / FISTA 的监控指标#
- 目标函数单调下降(ISTA) 或 重启后严格下降(FISTA);
- $\|x_{k+1} - x_k\|$ 衰减至容差,非光滑情形下最可靠的收敛判据;
- 活跃集稳定性:一旦 $x_k$ 的非零位置不再变化,基本已接近最优。
常见陷阱#
- 步长过大:$\eta > 1/L$ 会导致发散。若 $L$ 不确定,使用回溯线搜索:尝试 $\eta \cdot \beta$ ,若不满足充分下降条件则减半。
- 解路径无热启动:对每个 $\mu$ 从零开始是巨大浪费,务必热启动。
- 混淆 $\lambda$ 与 $\eta$ :注意 $\mathrm{prox}_{\eta \cdot \mu \|\cdot\|_1}$ 的阈值是 $\eta \mu$ ,而非 $\mu$ 或 $\eta$ 。
- 对 hinge / $\ell_1$ 直接用梯度下降:会在折点附近震荡。应使用近端或子梯度法。
练习题#
习题 1:闭式近端计算#
计算下列函数的 $\mathrm{prox}_{\lambda f}$ :
(a) $f(x) = \|x\|_1$ 。
$$\bigl[\mathrm{prox}_{\lambda f}(v)\bigr]_i = \mathrm{sign}(v_i)\max(|v_i| - \lambda, 0).$$(b) $f(x) = \iota_{B_\infty}(x)$ ,其中 $B_\infty = \{x : \|x\|_\infty \le 1\}$ 。
$$\bigl[\mathrm{prox}_{\lambda f}(v)\bigr]_i = \min\bigl(\max(v_i, -1),\, 1\bigr).$$注意结果与 $\lambda$ 无关。
(c) $f(x) = \tfrac{\beta}{3}\|x\|_3^3$ ($\beta > 0$ )。
$$\bigl[\mathrm{prox}_{\lambda f}(v)\bigr]_i = \mathrm{sign}(v_i) \cdot \frac{-1 + \sqrt{1 + 4\lambda\beta |v_i|}}{2\lambda\beta}.$$这是少数 $\ell_p$ 范数($p > 2$ )存在闭式近端的例子。
习题 2:Moreau 包络的可微性#
$$\nabla \widehat{f}_\lambda(x) = \frac{1}{\lambda}\bigl(x - \mathrm{prox}_{\lambda f}(x)\bigr).$$思路:
- 最小化点唯一,记 $y(x) := \mathrm{prox}_{\lambda f}(x)$ 。由非扩张性,$y(x)$ 关于 $x$ 是 1-Lipschitz 的。
- 一阶条件给出 $\tfrac{1}{\lambda}(x - y(x)) \in \partial f(y(x))$ 。
- 对 $\widehat{f}_\lambda(x) = f(y(x)) + \tfrac{1}{2\lambda}\|y(x) - x\|^2$ 应用包络定理:内层关于 $y$ 的偏导因最优性为零,仅剩 $\nabla_x \tfrac{1}{2\lambda}\|y - x\|^2 \big|_{y = y(x)} = \tfrac{1}{\lambda}(x - y(x))$ 。
因 $y(x)$ 1-Lipschitz,$\nabla \widehat{f}_\lambda$ 为 $\tfrac{1}{\lambda}$ -Lipschitz,故包络自动光滑。
习题 3:为何 SVM 近端“无用”#
考虑线性 SVM:$f(w) = \sum_i \max(0, 1 - y_i x_i^\top w) + \tfrac{\lambda}{2}\|w\|_2^2$ 。
(a) 给出 $f$ 在 $w$ 处的一个子梯度。
$$ \partial \ell_i(w) = \begin{cases} \{0\}, & y_i x_i^\top w > 1, \ \{- y_i x_i\}, & y_i x_i^\top w < 1, \ [-y_i x_i, 0], & y_i x_i^\top w = 1. \end{cases} $$总子梯度:$\partial f(w)i \sum_i g_i + \lambda w$ ,其中 $g_i \in \partial \ell_i(w)$ 。
(b) 证明计算 $\mathrm{prox}_{\alpha f}(0)$ 与求解 SVM 本身难度相当。
$$\mathrm{prox}_{\alpha f}(0) = \arg\min_w \;\sum_i \max(0, 1 - y_i x_i^\top w) + \tfrac{1}{2}\!\left(\lambda + \tfrac{1}{\alpha}\right)\|w\|_2^2.$$这本身就是一个 SVM 问题,仅正则强度变为 $\lambda + 1/\alpha$ 。结论:不要对整个复杂目标计算近端,近端方法的优势仅在能干净分离出易处理的非光滑部分时才显现。
习题 4:投影梯度是 ISTA 特例#
证明约束优化 $\min_{x \in C} g(x)$ ($g$ 光滑,$C$ 闭凸)等价于复合问题 $\min_x g(x) + \iota_C(x)$ ,并写出 ISTA 迭代。
$$ x_{k+1} = P_C\!\bigl(x_k - \eta \nabla g(x_k)\bigr). $$这正是投影梯度法,即 $h = \iota_C$ 时的 ISTA。加入动量即得加速投影梯度法。
总结#
近端算子的核心价值在于一个具体目标:将“非光滑”或“带约束”部分从主问题中隔离,转化为小型子问题。具体而言:
- $\ell_1$ 的不可微性 → 软阈值;
- 凸约束 → 投影;
- 整体非光滑函数 → 可微的 Moreau 包络。
最小操作清单:
- ISTA:$x_{k+1} = \mathrm{prox}_{\eta h}(x_k - \eta\nabla g(x_k))$ ,$\eta \le 1/L$ ,$O(1/k)$ ;
- FISTA:在外推点执行 ISTA 步,更新 $t_k$ ;$O(1/k^2)$ ,实践中常用函数值重启;
- LASSO:FISTA + 软阈值 + $\mu$ 路径热启动,工业界 $\ell_1$ 求解标准方案;
- ADMM:当存在两个非光滑项或等式约束时,按变量拆分并交替更新。
掌握这些工具后,下次再遇到目标函数中的 $\|\cdot\|_1$ 、$\iota_C$ 、全变分或核范数,便无需畏惧,它们都只是“一次近端之遥”。
延伸阅读#
- N. Parikh, S. Boyd. Proximal Algorithms. Foundations and Trends in Optimization, 2014.(权威综述)
- A. Beck, M. Teboulle. A Fast Iterative Shrinkage-Thresholding Algorithm for Linear Inverse Problems. SIAM J. Imaging Sciences, 2009.(FISTA 原文)
- S. Boyd 等. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. FnTML, 2011.(ADMM 综述)
- L. Condat 等. Proximal Splitting Algorithms for Convex Optimization: A Tour of Recent Advances. SIAM Review, 2023.(最新综述,含 PDHG / Condat-Vu)


